Station de pointage d'antenne satellitaire
Projet MICRO-210 EPFL en assembleur AVR : une station embarquée temps réel sur ATmega128L qui pilote un stepper d'azimut, un servo d'élévation, une télécommande RC5, une base EEPROM, un LCD et un mode SCAN 360°.
Résumé
Station de pointage d’antenne satellitaire est un projet de microcontrôleurs réalisé à l’EPFL au printemps 2026 dans le cadre du cours MICRO-210. Le but était de construire, à l’échelle d’un microcontrôleur 8 bits, une station capable de pointer une antenne miniature vers des satellites stockés en mémoire.
Le système tourne sur une carte STK-300 avec un ATmega128L à 4 MHz. Il pilote un moteur pas-à-pas X27.168 pour l’azimut, un servomoteur Futaba S3003 pour l’élévation, un écran LCD HD44780 2×16, une télécommande infrarouge RC5, un buzzer piézoélectrique, une liaison UART à 19 200 bauds et une base satellites persistante en EEPROM.
La contrainte qui rend le projet vraiment intéressant : tout est écrit en assembleur AVR, sans ligne de C. Chaque timer, interruption, registre, flag, bit d’EEPROM et cycle d’attente est manipulé explicitement.
Projet réalisé avec Lars Clausen.
Dépôt GitHub : AboutJean/MCU-station-pointage-de-sattelites
Cours
MICRO-210 · EPFL
Projet MCU2026-G111, groupe 111, section Génie microtechnique.
Matériel
ATmega128L + STK-300
Stepper X27 pour l’azimut, servo S3003 pour l’élévation.
Modes
MANUEL · AUTO · SCAN
Pilotage direct, Go-To depuis l’EEPROM et balayage complet du ciel.
Code
~5 762 lignes AVR
20 fichiers, architecture drivers/libs, FSM et routines temps réel.
Simulation interactive
Station de pointage virtuelle
Une petite maquette web du firmware : télécommande RC5, couches
BROWSING/IN_MODE, mode MANUEL, Go-To AUTO,
sweep SCAN, LCD, UART et actionneurs.
Servo élévation · PB5 / OC1A
EL 0° · PWM 500
Stepper azimut · PORTD[0:3]
AZ 000° · 0 pas partiels
IR + buzzer · PE7 / PE2
Dernière commande INIT
LCD HD44780 · XMEM
EEPROM / sélection
Slot 0 · ISS
Slots valides 10/32 · Hits SCAN 0
UART terminal · 19 200 bps
System init... OK FSM ready.
Astuce : maintiens CH ou VOL pour voir
l'accélération RC5. POWER interrompt tout mouvement.
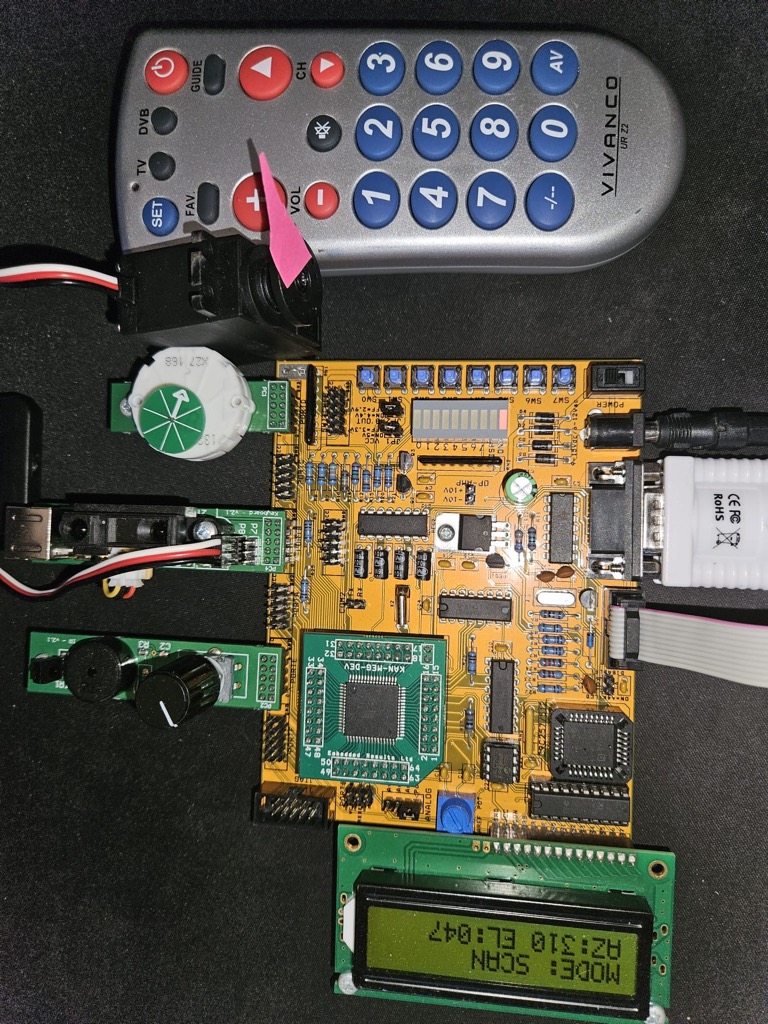
Prototype physique : carte STK-300, modules EPFL, télécommande RC5, stepper d’azimut et LCD.
1. Introduction
1.1 Contexte et inspiration
Le réseau ESTRACK de l’ESA utilise des antennes paraboliques réparties sur le globe pour communiquer avec des satellites. Chaque antenne doit pointer vers une cible en orbite avec une précision de l’ordre du dixième de degré, en contrôlant deux axes :
- l’azimut, rotation horizontale sur 0°–360° ;
- l’élévation, inclinaison verticale sur 0°–90°.
Notre projet reprend ce concept en version miniature : une station de pointage capable de stocker des satellites, de s’orienter automatiquement vers eux, ou de balayer le ciel pour retrouver ceux qui correspondent à l’élévation courante.
Le choix de l’assembleur n’était pas du masochisme, même si le Git log suggère parfois le contraire. C’était le cœur pédagogique du projet : programmer en AVR force à comprendre exactement ce que fait le processeur à chaque cycle d’horloge. Chaque bit de chaque registre a une signification, et aucune abstraction ne vient masquer le matériel.
1.2 Ce que fait le système
La station sait faire trois choses :
- Pointer manuellement : l’utilisateur contrôle l’azimut et l’élévation à la télécommande, comme avec un joystick.
- Pointer automatiquement : l’utilisateur choisit un satellite dans une base de 32 slots EEPROM, puis l’antenne s’y déplace seule par le chemin azimutal le plus court.
- Scanner le ciel : l’antenne effectue une rotation complète de 360° et détecte les satellites visibles depuis l’élévation actuelle.
1.3 En un coup d’œil
| Caractéristique | Détail |
|---|---|
| MCU | ATmega128L à 4 MHz, oscillateur RC interne |
| Carte | STK-300 EPFL |
| Axe azimut | Moteur pas-à-pas X27.168, 1/3° par pas, 360° continu |
| Axe élévation | Servomoteur Futaba S3003, PWM 50 Hz, 0°–90° |
| Interface | Télécommande IR Vivanco UR Z2, protocole RC5 |
| Affichage | LCD HD44780 2×16, memory-mapped |
| Communication | UART 19 200 bauds, miroir et injection de commandes |
| Stockage | EEPROM interne, 32 slots × 16 octets |
| Code | ~5 762 lignes d’assembleur AVR, 20 fichiers |
| Langage | 100% assembleur AVR |
2. Architecture matérielle
2.1 Vue d’ensemble du montage
Le système est construit autour de la STK-300. L’ATmega128L reçoit les commandes IR ou UART, met à jour sa machine à états, puis pilote les actionneurs et les retours utilisateur.
Architecture matérielle
STK-300 au centre, périphériques autour
Le montage garde l'ATmega128L comme point de convergence : entrées RC5 et UART d'un côté, actionneurs, LCD et buzzer de l'autre.
Entrées
Actionneurs et affichage
Schéma système
Architecture embarquée du projet
Une lecture compacte du système : commandes RC5 ou UART, FSM à deux couches, drivers bas niveau, affichage, persistance EEPROM et actionneurs pour l'azimut et l'élévation.
Entrées utilisateur
- télécommande IR RC5 sur PE7
- terminal PC sur UART0
- touches chiffres, GUIDE, AV, POWER
Cœur FSM
- couche BROWSING / IN_MODE
- dispatch par priorité
- handlers AUTO, MANUEL, SCAN
Actionneurs
- stepper X27 sur PORTD[0:3]
- servo S3003 sur PB5 / OC1A
- buzzer piézo sur PE2
Temps et interruptions
- INT7 capture une trame RC5
- Timer2 décrémente les overlays à 1 ms
- Timer1 génère le PWM servo en hardware
Affichage et retour
- LCD HD44780 2x16 via XMEM
- overlays temporises SAVED / DELETED
- miroir VT100 sur UART
Mémoire et données
- 32 slots EEPROM de 16 octets
- cache SRAM pour le balayage SCAN
- curseurs, cibles et position courante
2.2 L’ATmega128L, le cerveau
L’ATmega128L est un microcontrôleur AVR 8 bits à architecture Harvard, avec mémoire programme et mémoire données séparées.
| Ressource | Capacité | Utilisation dans le projet |
|---|---|---|
| Flash | 128 Ko | Code, tables, chaînes, environ 8 Ko utilisés |
| SRAM | 4 Ko | Variables FSM, buffers, cache SCAN |
| EEPROM | 4 Ko | Base de données satellites, 512 octets utilisés |
| Timer1 | 16 bits | PWM servo 50 Hz, Fast PWM mode 14 |
| Timer2 | 8 bits | Tick système 1 ms, mode CTC |
| INT7 | Interruption externe | Capture télécommande IR sur front descendant |
| UART0 | Série | Miroir LCD et injection de commandes |
| Bus XMEM | Externe | LCD memory-mapped |
| GPIO | 53 broches | Stepper, buzzer, servo, IR |
Le processeur tourne à 4 MHz avec son oscillateur RC interne. Cette fréquence
peut varier d’environ ±3% selon la température. C’est encore compatible avec le
décodage RC5, mais seulement parce que la constante T1 a été calibrée à
1870 µs plutôt qu’aux 1778 µs théoriques.
2.3 Le moteur pas-à-pas X27, l’azimut
Le X27.168 est un micro-moteur pas-à-pas bipolaire utilisé dans des tableaux de bord automobiles. Il possède un réducteur interne de 1:180 :
- 6 patterns électriques = 1 tour moteur = 2° à la sortie ;
- 3 patterns = 1° ;
- 1080 patterns = 360°.
| Index | PD3 | PD2 | PD1 | PD0 | Valeur hex | Bobines actives |
|---|---|---|---|---|---|---|
| 0 | 0 | 1 | 0 | 1 | 0x05 | C1+ et C2+ |
| 1 | 0 | 0 | 0 | 1 | 0x01 | C1+ |
| 2 | 1 | 0 | 1 | 1 | 0x0B | C1+ et C2- |
| 3 | 1 | 0 | 1 | 0 | 0x0A | C2- |
| 4 | 1 | 1 | 1 | 0 | 0x0E | C1- et C2- |
| 5 | 0 | 1 | 0 | 0 | 0x04 | C2+ |
motor_sequence_table:
.db 0x05, 0x01, 0x0B, 0x0A, 0x0E, 0x04Le X27 n’a pas besoin de pont en H externe dans ce montage. Ses bobines font
environ 160 Ω : à 5 V, cela donne environ 31 mA par bobine, ce qui reste dans
les capacités des GPIO de l’ATmega128. Le projet attaque donc les bobines
directement depuis PORTD[0:3].
Le curseur motor_step_idx avance ou recule dans la table. Un délai de
3 ms entre deux pas laisse le temps à la mécanique de se stabiliser.
2.4 Le servomoteur S3003, l’élévation
Le Futaba S3003 est commandé par un signal PWM à 50 Hz. La position est proportionnelle à la largeur de l’impulsion :
Signal PWM
Un créneau de 20 ms pour commander l'élévation
Timer1 produit le signal en matériel. Le firmware ne fait que modifier
OCR1A, donc la période reste stable et sans jitter logiciel.
OCR1A = 500 + angle × 400 / 90 Le Timer1 est configuré en Fast PWM mode 14, avec ICR1 comme TOP :
| Paramètre | Valeur | Signification |
|---|---|---|
| Prescaler | /8 | 1 tick = 2 µs à 4 MHz |
| ICR1 | 10 000 | Période de 20 ms, soit 50 Hz |
| OCR1A min | 500 | Pulse 1.0 ms, donc 0° |
| OCR1A max | 900 | Pulse 1.8 ms, donc 90° |
| Résolution | 400 ticks | ~0.225° par tick |
| Pas utilisateur | 10 ticks | ~2.25° par pression VOL |
servo_init:
sbi DDRB, 5
OUTI TCCR1A, (1<<COM1A1)|(1<<WGM11)
OUTI TCCR1B, (1<<WGM13)|(1<<WGM12)|(1<<CS11)
LDI2 a1,a0, 10000
sts ICR1H, a1
sts ICR1L, a0
LDI2 a1,a0, 500
sts OCR1AH, a1
sts OCR1AL, a0
STS2 target_ticks, a1,a0
retLe double buffering matériel de OCR1A évite les glitchs : une nouvelle valeur
n’est appliquée qu’au prochain passage par TOP.
2.5 L’écran LCD HD44780
Le LCD est interfacé via le bus mémoire externe XMEM de l’ATmega128. Le contrôleur LCD est mappé dans l’espace d’adressage :
XMEM LCD
Le LCD vu comme deux adresses mémoire
Le bus mémoire externe génère les signaux ALE, /WR
et /RD. Le code applicatif écrit donc dans le LCD comme dans
une zone mémoire.
Commandes HD44780 : clear, cursor home, mode d'entrée, configuration.
Caractères ASCII écrits sur la ligne courante du LCD 2×16.
Écrire un caractère devient une seule instruction assembleur :
ldi a0, 'A'
sts 0xC000, a0Le bus XMEM utilise PORTA pour les données, PORTC pour l’adresse haute et
PORTG pour /WR, /RD et ALE. Le bit SRE active le bus externe, avec un
wait state SRW10=1 pour respecter le timing du HD44780. Le busy flag doit
être vérifié avant chaque écriture.
2.6 La télécommande infrarouge RC5
Le protocole RC5 de Philips encode chaque trame sur 14 bits Manchester :
Trame RC5
14 bits Manchester, capturés sans périphérique dédié
Le démodulateur TSOP réveille INT7. L'ISR attend ensuite le
centre de chaque bit et échantillonne PE7.
HIGH → LOW au milieu du bit LOW → HIGH au milieu du bit T1 ≈ 1870 µs, calibré pour l'oscillateur 4 MHz Le décodeur fonctionne par échantillonnage bit-bang :
INT7se déclenche sur un front descendant ;- le firmware attend
T1/4pour se centrer sur le premier bit ; - il lit
PE7, pousse le bit dans un registre résultat ; - il attend
T1et répète 14 fois.
rc5_capture_from_edge:
WAIT_US (T1/4 - 2)
ldi b2, 14
_rc5_loop:
P2C PINE, 7
ROL2 b1, b0
WAIT_US (T1 - 4)
DJNZ b2, _rc5_loop
com b0
retLe toggle bit distingue une nouvelle pression d’une touche maintenue. S’il
change, c’est un nouvel appui ; s’il reste identique, c’est une répétition. Ce
mécanisme alimente held_count pour accélérer le mode MANUEL.
2.7 Le buzzer piézoélectrique
Le buzzer est piloté par bit-banging sur PE2. Le son standard est un petit
« doot-doot » descendant de 1500 Hz vers 1000 Hz, sur environ 60 ms.
chirp:
ldi _w, 45
_n1:
sbi BUZZER_PORT, BUZZER_PIN
WAIT_US 333
cbi BUZZER_PORT, BUZZER_PIN
WAIT_US 333
dec _w
brne _n1
ldi _w, 30
_n2:
sbi BUZZER_PORT, BUZZER_PIN
WAIT_US 500
cbi BUZZER_PORT, BUZZER_PIN
WAIT_US 500
dec _w
brne _n2
ret2.8 L’interface UART
L’UART0 fonctionne à 19 200 bauds, 8-N-1. Il sert à deux choses :
- miroir LCD : chaque rendu LCD est répliqué sur terminal avec des séquences ANSI/VT100 ;
- injection de commandes : les touches du clavier PC sont converties en commandes RC5 équivalentes.
ESC[H
---- MCU2026-G111 ----
MODE: AUTO LAYER: IN_MODE
AZ: 0771 steps EL: 0650 us
ACTION: MOVING
--------LCD--------
L1: Sat: ISS
L2: AZ:257 EL:024
--------------------Le calcul de baudrate est favorable : UBRR = 4000000 / (16 × 19200) - 1 = 12.02. L’arrondi à 12 donne une erreur d’environ 0.16%, très acceptable.
À 115 200 bauds, l’erreur aurait été autour de 8.5%, donc inutilisable.
2.9 Carte des broches
| Port | Allocation |
|---|---|
PORTA | Bus données LCD, XMEM AD0-AD7 |
PORTB | PB5 = OC1A vers le servo S3003 |
PORTC | Adresse haute LCD, XMEM A8-A15 |
PORTD | PD0 = Coil1+, PD1 = Coil1-, PD2 = Coil2+, PD3 = Coil2- vers le stepper X27 |
PORTE | PE0 = TXD0, PE1 = RXD0, PE2 = buzzer, PE7 = IR TSOP / INT7 |
PORTF | Libre, ADC et extension future |
PORTG | PG0 = /WR, PG1 = /RD, PG2 = ALE pour le contrôle XMEM |
3. Architecture logicielle
3.1 Philosophie de conception
Le code est séparé en deux couches :
Architecture logicielle
Deux couches, une frontière volontaire
FSM, modes, affichage, overlays et handlers partagés.
Ne manipulent presque pas les registres hardware.LCD, servo, stepper, RC5, UART, EEPROM, timers et math bas niveau.
Exposent des fonctions réutilisables au reste du firmware.Les drivers ne connaissent pas la FSM. Ils exposent des primitives comme
step_motor_forward, servo_nudge_up ou load_satellite. Les libs orchestrent
ces primitives et maintiennent la logique applicative.
3.2 La machine à états
Machine à états
Deux couches pour garder le firmware lisible
La couche BROWSING choisit le mode actif. La couche
IN_MODE délègue ensuite les touches au handler du mode
courant. POWER reste prioritaire partout.
CH+/CH- font défiler AUTO, MANUEL et SCAN.
Les commandes sont interprétées par le mode sélectionné.
AUTO
- Browse sat
- Moving AZ
- Moving EL
- Arrived
DEL ouvre une branche de confirmation avant suppression.
MANUEL
- Jogging
- Confirm save
- SAVED overlay
Le compteur held_count transforme un maintien RC5 en accélération.
SCAN
- Idle
- Sweeping 360°
- No results
- Filtered browse
Les hits sont stockés dans un bitmap de 32 bits puis réutilisés par AUTO.
flag_is_moving = 1, la navigation est bloquée pour
éviter une position SRAM désynchronisée de la position physique.
La FSM est volontairement divisée en deux couches. BROWSING choisit le mode,
IN_MODE exécute le mode. Le bouton AV bascule entre les deux. POWER force
le retour vers BROWSING depuis n’importe quel état et agit comme arrêt
d’urgence.
Le verrou can_transition empêche de changer de mode pendant un mouvement
automatique. Sans cette protection, un Go-To interrompu au mauvais moment
pourrait désynchroniser la position SRAM et la position physique du stepper.
3.3 La boucle principale
Le firmware suit un pattern coopératif non-préemptif :
| Priorité | Test dans la boucle | Action |
|---|---|---|
| 1 | Overlay expiré ? | Restaurer lcd_l2_buf et redessiner le LCD |
| 2 | Donnée UART ? | Convertir l’ASCII en commande RC5 synthétique |
| 3 | ir_event_flag ? | Dispatcher la commande utilisateur |
| 4 | flag_is_moving ? | Appeler le handler actif avec cmd = 0xFF |
| 5 | Rien à faire | Reboucler immédiatement |
Points subtils :
- l’UART est pollé avant le flag IR ;
- quand
flag_is_moving = 1, les handlers avancent le mouvement par petits pas, sans OS ni scheduler ; - les handlers remplissent
lcd_l2_buf, puisdraw_lcdfait le rendu final ; - les commandes sont dispatchées avec priorité :
POWER, puis overlays,MUTE,AV, puis handler de mode.
3.4 Organisation du code
code_source/
├── main.asm Point d'entrée, ISR, dispatch FSM
├── Projet_MC.asmproj Projet Atmel Studio, ATmega128
│
├── libs/
│ ├── constants.inc Constantes .equ
│ ├── definitions.asm Alias registres, constantes HW
│ ├── macros.asm 1840 lignes de macros AVR
│ ├── pinout.inc Allocation des broches
│ ├── shared_handlers.asm Colle FSM
│ ├── overlay.asm Messages transitoires temporisés
│ ├── display.asm Rendu LCD
│ ├── mode_auto.asm Mode AUTO
│ ├── mode_manuel.asm Mode MANUEL
│ └── mode_scan.asm Mode SCAN
│
├── drivers/
│ ├── rc5_logic.asm Décodage IR RC5
│ ├── lcd.asm Driver HD44780 via XMEM
│ ├── logique_pointage.asm PWM servo et math pointage
│ ├── 0ec_motor_sequence.asm Séquence stepper X27
│ ├── eeprom_layout.asm Base EEPROM
│ ├── timer_manager.asm Timer2 CTC 1 ms
│ ├── uart_control.asm Miroir UART et injection
│ ├── buzzer.asm Bips
│ └── math_revised.asm Arithmétique 16 bits
│
├── libraries_cours/
│ └── uart_et_strings/
│ └── uart.asm UART0 fourni par le cours
│
└── Debug/
├── Projet_MC.hex Firmware Intel HEX
└── Projet_MC.eep Image EEPROM initialeL’ordre des .include dans main.asm est critique, car le code assembleur est
linéarisé :
.include "libs/definitions.asm"
.include "libs/macros.asm"
.include "libs/constants.inc"
.include "libs/pinout.inc"
.include "libs/shared_handlers.asm"
.include "libs/overlay.asm"
.include "libs/display.asm"
.include "libs/mode_auto.asm"
.include "libs/mode_manuel.asm"
.include "libs/mode_scan.asm"
.include "drivers/rc5_logic.asm"
.include "drivers/logique_pointage.asm"
; ...
.include "drivers/lcd.asm"lcd.asm est placé en dernier car certaines routines l’appellent avec call
plutôt que rcall. Sur AVR, rcall est limité à ±2K mots ; call n’a pas
cette limite, mais coûte 2 cycles de plus.
3.5 Conventions de registres
| Registre(s) | Alias | Rôle |
|---|---|---|
r0 | char | Cible implicite de LPM |
r1 | _sreg | Sauvegarde SREG dans les ISR |
r2 | _u | Sauvegarde de u dans les ISR |
r3 | u | Scratch pour WAIT_US / WAIT_MS |
r4-r5 | e0, e1 | Temporaires PRINTF |
r6-r7 | — | Libres |
r8-r11 | c0..c3 | Résultat de mul22 / div22 |
r12-r15 | d0..d3 | Reste de div22 |
r16 | w | Registre de travail principal |
r17 | _w | Registre de travail secondaire / ISR |
r18-r21 | a0..a3 | Opérande A, 32 bits |
r22-r25 | b0..b3 | Opérande B, 32 bits |
r26-r27 | X | Pointeur X |
r28-r29 | Y | Pointeur Y |
r30-r31 | Z | Pointeur Z et accès LPM |
Les registres r0-r15 ne supportent pas ldi, cpi ou andi. Les macros du
cours contournent cette asymétrie avec des pseudo-instructions comme _LDI,
_CPI et _ANDI.
3.6 La bibliothèque de macros
macros.asm compte environ 1840 lignes. Il fournit :
| Catégorie | Exemples | Usage |
|---|---|---|
| Pointeurs | LDIX, LDIY, LDIZ | Charger une adresse SRAM ou Flash |
| I/O | OUTI, OUTEI | Écrire une valeur immédiate dans un port |
| Attente | WAIT_US, WAIT_MS | Délais calibrés à 4 MHz |
| Branchement | JK, JNK, JSK | Sauts conditionnels étendus |
| Multi-octets | LDI2, STS2, ADD2, CP2 | Arithmétique 16/32 bits |
| Bits | MOVB, JB0, JB1, P2C | Manipulation de bits |
| Pile | PUSH2, POP2 | Sauvegarde de paires |
4. Les trois modes
4.1 Mode MANUEL
Le mode MANUEL fait de la télécommande un joystick :
| Touche | Effet |
|---|---|
CH+ | Azimut positif |
CH- | Azimut négatif |
VOL+ | Élévation positive |
VOL- | Élévation négative |
GUIDE | Armer puis confirmer la sauvegarde |
L’accélération progressive dépend de held_count :
| Maintien | Pas par répétition | Vitesse approximative |
|---|---|---|
| moins de 1 s | 1° | ~10°/s |
| 1 à 3 s | 5° | ~50°/s |
| plus de 3 s | 10° | ~100°/s |
pick_step_size:
lds w, held_count
cpi w, HOLD_THRESHOLD_FAST
brsh _fast
cpi w, HOLD_THRESHOLD_MED
brsh _med
_slow:
ldi a0, HOLD_STEP_SLOW
ret
_med:
ldi a0, HOLD_STEP_MED
ret
_fast:
ldi a0, HOLD_STEP_FAST
retLa sauvegarde se fait en deux pressions : le premier GUIDE affiche
SAVE:PRESS GUIDE, le second écrit la position courante dans le premier slot
EEPROM libre. L’overlay SAVED reste affiché pendant environ 500 ms.
4.2 Mode AUTO
Le mode AUTO est un navigateur de base satellites. Il affiche le nom de la cible et ses coordonnées :
CH+ et CH- passent au satellite valide suivant ou précédent. Les touches
0-9 donnent un accès direct aux premiers slots. Le curseur saute les slots
vides, identifiés par l’absence du magic byte 0x5A. Un compteur de sécurité
limité à 32 essais évite une boucle infinie si la base est vide.
Le Go-To déclenché par GUIDE se déroule en deux phases :
- calcul du plus court chemin d’azimut ;
- mouvement du stepper jusqu’à la cible ;
- ajustement de l’élévation par servo ;
- chirp et overlay
ARRIVED.
La suppression utilise aussi deux pressions :
- premier
DEL:DEL? PUSH DEL; - deuxième
DEL: magic byte mis à0x00, overlayDELETED; - toute autre touche annule la suppression.
4.3 Mode SCAN
Le mode SCAN effectue un balayage de 360°. Il compare chaque degré d’azimut à la base satellites et détecte les cibles compatibles avec l’élévation courante.
Mode SCAN
Du bouton GUIDE au navigateur filtré
Attente avec SCAN: PUSH GUIDE.
Cache EEPROM vers SRAM, puis snapshot de l'élévation actuelle.
Rotation 360° et test des 32 slots à chaque degré.
Chaque satellite détecté positionne un bit dans scan_results.
Aucune cible compatible avec la bande d'élévation.
Navigation AUTO filtrée sur les satellites détectés.
Un satellite est détecté si :
- son azimut correspond au degré courant ;
- son élévation est dans la bande
élévation_courante ± 10°.
La tolérance d’élévation simule le lobe d’ouverture d’une vraie antenne.
Le mode charge d’abord les données EEPROM dans un cache SRAM :
| Buffer SRAM | Taille | Rôle |
|---|---|---|
scan_cache_az | 64 octets | 32 azimuts stockés sur 2 octets |
scan_cache_el | 32 octets | 32 élévations stockées sur 1 octet |
scan_cache_valid | 4 octets | Bitmap de validité des 32 slots |
Sans cache, un tour complet demanderait environ 360 × 32 accès EEPROM. Avec
le cache, il reste seulement 32 lectures initiales puis des comparaisons SRAM.
Les résultats sont stockés dans un bitmap de 32 bits :
| Octet | Slots représentés |
|---|---|
scan_results[0] | slots 0 à 7 |
scan_results[1] | slots 8 à 15 |
scan_results[2] | slots 16 à 23 |
scan_results[3] | slots 24 à 31 |
L’accès au bit utilise une LUT en Flash :
bitmask_lut:
.db 1, 2, 4, 8, 16, 32, 64, 128Après le sweep, si au moins un bit est positionné, slot_filter_mode = 1 et le
navigateur AUTO ne montre plus que les satellites détectés.
5. Mini-lab interactif
Le composant ci-dessous rejoue les calculs essentiels du firmware : chemin azimutal le plus court, conversion en pas partiels du X27, largeur PWM du servo et fenêtre de détection du SCAN.
Mini labo
Mini simulation du pointage
Ce petit labo reprend deux idées du projet : le Go To
choisit toujours le chemin azimutal le plus court modulo 360 degrés, puis
ajuste l'élévation via le PWM du servo.
Rotation la plus courte
Diminuer l'azimut de 92°, soit 276 pas partiels.
Élévation par PWM
Appliquer 56° sur le servo, soit environ 1.50 ms.
6. Deep-dive technique
6.1 Décodage RC5
Le décodage RC5 est le morceau le plus sensible au timing. Le TSOP fournit un signal digital, mais pas d’horloge. Le firmware échantillonne donc au centre de chaque bit Manchester.
| Étape | Timing | Rôle |
|---|---|---|
| 1 | Front descendant sur PE7 | Déclenche INT7 |
| 2 | Attente T1/4 | Se placer au centre du premier bit |
| 3 | Lecture de PE7 | Échantillonner S1, puis S2, Toggle, Adresse, Commande |
| 4 | Attente T1 | Passer au centre du bit suivant |
| 5 | 14 répétitions | Recomposer la trame RC5 complète |
L’ISR EXT_INT7 est bloquante pendant environ 26 ms. Pendant ce temps,
aucune autre interruption n’est servie et la boucle principale est gelée. C’est
un compromis assumé : capturer la trame sans jitter est prioritaire, et les
overlays de 500 ms tolèrent cette erreur temporelle.
6.2 PWM servo
Le Timer1 16 bits est le bon choix pour le servo :
| Option | Résolution | Fréquence | Problème |
|---|---|---|---|
| Timer0 Fast PWM | ~31 µs | 1.9 kHz | Trop rapide pour un servo |
| Timer0 Phase Correct | ~31 µs | 961 Hz | Encore trop rapide |
| Timer1 Fast PWM 14 | 2 µs | 50 Hz | Adapté |
La relation est :
Un bug matériel a marqué le projet : la première version utilisait PB4/OC0 avec Timer0. La fréquence disponible faisait vibrer le servo au lieu de le positionner. Le déplacement du jumper M4 vers PB5/OC1A pour utiliser Timer1 a résolu le problème.
6.3 Stepper et demi-pas
Le X27 est un moteur bipolaire à deux bobines. Le pilotage alterne entre états à deux bobines et états à une bobine :
| Position | C1+ | C1- | C2+ | C2- | Champ magnétique |
|---|---|---|---|---|---|
| 0 | ON | off | ON | off | Nord-Est |
| 1 | ON | off | off | off | Est |
| 2 | ON | off | off | ON | Sud-Est |
| 3 | off | off | off | ON | Sud |
| 4 | off | ON | off | ON | Sud-Ouest |
| 5 | off | ON | off | off | Ouest |
Avec le réducteur 1:180, il faut 6 × 180 = 1080 pas partiels pour un tour
complet, soit 1/3° par pas.
6.4 EEPROM persistante
Chaque slot satellite occupe 16 octets :
| Offset | Contenu | Taille | Exemple ISS |
|---|---|---|---|
| 0 | Magic byte | 1 octet | 0x5A |
| 1-10 | Nom ASCII padded | 10 octets | "ISS " |
| 11-12 | Azimut little-endian | 2 octets | 0x0101 = 257° |
| 13 | Élévation | 1 octet | 0x18 = 24° |
| 14-15 | Padding | 2 octets | 0x0000 |
L’écriture EEPROM impose une séquence critique :
EEPROM_write_byte:
sbic EECR, EEWE
rjmp EEPROM_write_byte
out EEARH, r17
out EEARL, r16
out EEDR, r18
in r19, SREG
cli
sbi EECR, EEMWE
sbi EECR, EEWE
out SREG, r19
retLe cli est indispensable. Si une interruption se produit entre EEMWE et
EEWE, le délai de 4 cycles est dépassé et l’écriture peut échouer
silencieusement.
6.5 LCD memory-mapped
Grâce à XMEM, une commande LCD ressemble à une écriture mémoire normale :
ldi w, 0x01
sts LCD_IR, wLe matériel génère ensuite les signaux : données sur PORTA, adresse haute sur
PORTC, pulse ALE, puis pulse /WR.
6.6 Overlays temporisés
Les overlays affichent temporairement SAVED, DELETED, UART ON, ARRIVED
ou d’autres messages sur la ligne 2 du LCD.
Overlays
Messages temporaires sans bloquer la boucle principale
overlay_ms_left est sur 16 bits ; les écritures depuis le contexte principal
sont donc protégées par cli/sei.
6.7 UART comme debug en production
Le miroir UART est un outil de debug embarqué. Quand il est actif, chaque affichage LCD envoie aussi l’état interne sur terminal :
- couche FSM ;
- mode courant ;
- position azimut et élévation ;
- statut de mouvement ;
- contenu logique des deux lignes LCD.
L’injection de commandes forge un événement IR synthétique : l’UART écrit dans
last_cmd, inverse last_tog, positionne le flag, puis la boucle principale
traite la commande exactement comme si elle venait de la télécommande.
7. Algorithmes clés
7.1 Chemin le plus court en azimut
L’azimut vit sur un cercle. Aller de 350° à 10° doit prendre +20°, pas -340°.
shortest_path_az:
sub r18, r16
sbc r19, r17
cpi r18, low(181)
ldi w, high(181)
cpc r19, w
brlt _check_neg
subi r18, low(360)
sbci r19, high(360)
_check_neg:
cpi r18, low(-180)
ldi w, high(-180)
cpc r19, w
brge _done
subi r18, low(-360)
sbci r19, high(-360)
_done:
mov r16, r18
mov r17, r19
ret7.2 Arithmétique 16 bits en assembleur
L’ATmega128 est 8 bits. Les nombres 16 bits demandent donc des paires de registres et une propagation manuelle des retenues.
Multiplication 16×16 bits :
mul22:
CLR2 c3, c2
LDI2 c1, c0, b1, b0
ldi w, 16
_mul_loop:
LSR2 c1, c0
brcc _mul_no_add
ADD2 c3, c2, a1, a0
_mul_no_add:
ROR4 c3,c2,c1,c0
DJNZ w, _mul_loop
retDivision 16÷16 bits non-restoring :
div22:
MOV2 c1,c0, a1,a0
CLR2 d1, d0
ldi w, 16
_div_loop:
ROL4 d1,d0,c1,c0
SUB2 d1,d0, b1,b0
brcc _div_ok
ADD2 d1,d0, b1,b0
_div_ok:
ROL2 c1, c0
DJNZ w, _div_loop
COM2 c1, c0
ret7.3 Accélération hold-to-accelerate
La télécommande envoie environ 9 trames par seconde quand une touche est maintenue. Le toggle bit reste alors constant :
| Situation | Toggle bit | held_count |
|---|---|---|
| Touche maintenue | 1, 1, 1, 1, ... | 0, 1, 2, 3, ... |
| Touche relâchée puis ré-appuyée | 1, 1, 1 puis 0, 0, 0 | reset à 0, puis recommence |
Les seuils 10 et 30 répétitions correspondent à environ 1 s et 3 s.
7.4 Bitmap de détection
Pour tester ou positionner le bit du slot N :
| Quantité | Calcul |
|---|---|
| Octet cible | byte_offset = N / 8 |
| Bit dans l’octet | bit_position = N % 8 |
| Masque | mask = bitmask_lut[bit_position] |
La LUT {1, 2, 4, 8, 16, 32, 64, 128} remplace une boucle de shift. On dépense
8 octets de Flash pour rendre l’accès O(1).
8. Guide utilisateur
8.1 Mise en route
Matériel requis :
- carte STK-300 avec ATmega128L ;
- module M1 pour le stepper ;
- module M2 pour IR et buzzer ;
- module M4 pour le servo ;
- télécommande Vivanco UR Z2 compatible RC5 ;
- câble USB pour l’alimentation et éventuellement l’UART.
Procédure :
- brancher l’alimentation de la STK-300 ;
- attendre
MODE: AUTO/AZ:000 EL:000sur le LCD ; - laisser le servo se positionner à 0° ;
- aligner manuellement le stepper si nécessaire ;
- activer le miroir UART avec
MUTEsi besoin.
8.2 Commandes télécommande
| Touche | BROWSING | MANUEL | AUTO | SCAN |
|---|---|---|---|---|
CH+ / CH- | Changer de mode | Azimut ± | Satellite suivant/précédent | Inactif |
VOL+ / VOL- | Inactif | Élévation ±2.25° | Inactif | Inactif |
AV | Entrer dans le mode | Sortir | Sortir | Sortir |
GUIDE | Inactif | Sauvegarder | Lancer Go-To | Lancer sweep |
DEL | Inactif | Inactif | Supprimer | Inactif |
0-9 | Inactif | Inactif | Accès direct slot | Inactif |
MUTE | Toggle UART | Toggle UART | Toggle UART | Toggle UART |
POWER | Arrêt urgence | Arrêt urgence | Arrêt urgence | Arrêt urgence |
8.3 Commandes UART
Terminal série : 19 200 bauds, 8-N-1.
| Touche clavier | Commande RC5 | Fonction |
|---|---|---|
W / w | VOL_UP | Élévation + |
S / s | VOL_DN | Élévation - |
A / a | CH_UP | Azimut + ou mode suivant |
D / d | CH_DN | Azimut - ou mode précédent |
| Espace | GUIDE | Action principale |
X / x | DEL | Supprimer satellite |
M / m | AV | Entrer ou sortir du mode |
P / p | POWER | Arrêt d’urgence |
0-9 | CMD_0..9 | Accès direct slot |
L / l | spécial UART | Dump liste satellites |
U / u | MUTE | Toggle miroir UART |
8.4 Signaux sonores
| Son | Signification |
|---|---|
| 1 chirp | Confirmation simple |
| 1 chirp par satellite | Détection pendant le SCAN |
| 2 chirps | Arrêt d’urgence POWER |
| 1 chirp + overlay | Transit terminé |
9. Journal de développement
9.1 Timeline
Le projet a été développé en un sprint d’environ 48 heures, du 24 au 26 mai 2026.
24 mai 2026 — Jour 1 : fondations
12:40 Lars Initial commit
18:19 Jean Ajout documents + bibliothèques cours + helpers
19:07 Jean Intégration helpers + réorganisation des dépendances
21:19 Jean Mode save + contrôle EEPROM + feux rouges v3
21:56 Jean Fix bug mode save
22:31 Jean Mode AUTO v1
22:57 Jean Fix scroll + mouvement en arrière-plan + deg→pas
23:36 Jean Fix bug mode auto
25 mai 2026 — Jour 2 : la nuit la plus longue
00:11 Jean Fix bug mode auto
01:06 Jean New fix mode auto
01:27 Jean Magic byte implementation
01:42 Jean Empty slot try again
02:24 Lars empty fix + save_not_working
02:42 Jean fix save cette fois (baruch hashem si ça marche)
02:50 Jean fix 2/3 bugs en plus pour save
03:00 Jean Élévation en degrés + EL max 1800
03:21 Jean Fonction delete
03:38 Jean Fix affichage LCD suppression
16:16 Lars SCAN MODE IMPLÉMENTÉ
17:45 Jean UART test 1
18:05 Jean Fix UART bugs
18:25 Jean Fix registre r16 pour UART + affichage LCD dans UART
18:38 Jean Fix UART bug encore
18:52 Jean Retour arrière UART + correction affichages satellites
19:00 Jean Reset UART first try
19:11 Jean Nettoyage : arrêt suivi dossier Debug
19:13 Jean Revert "add UART test 1"
19:14 Jean Ajout .gitignore pour Debug
19:31 Jean fix uart STPPPPPP ça marche
19:55 Jean Fix affichage UART
20:02 Jean Fix affichage UART
20:16 Jean Ajout touches pour UART
20:31 Jean Toggle pour UART
20:38 Jean Fix toggle UART
21:54 Lars Buzzer fix
23:41 Lars Refactor + timer displays
26 mai 2026 — Jour 3 : finition
02:30 Lars IR interrupts
04:28 Lars final_v1
14:01 Lars init github
14:06 Lars change names9.2 Les galères mémorables
La saga du Save a été le bug le plus tenace. Entre 01h et 03h du matin, plusieurs commits se sont enchaînés autour du format EEPROM. Le vrai problème : un décalage d’un octet dans le slot, avec 5 espaces de padding au lieu de 4, décalait les champs azimut et élévation.
La saga de l’UART a demandé environ 15 commits en 3 heures, dont un revert
complet. Le bug principal venait de r16 alias w, modifié par des macros
utilisées dans le driver UART, ce qui corrompait la commande RC5 forgée.
9.3 Statistiques
| Métrique | Valeur |
|---|---|
| Commits totaux | 40 |
| Durée | ~48 heures |
| Commits par Jean | 31, soit 78% |
| Commits par Lars | 9, soit 22% |
| Lignes de code | ~5 762 lignes .asm / .inc |
| Fichiers source | 20 |
| Nuit blanche | Au moins 1 |
| Commit le plus désespéré | fix save cette fois (baruch hashem si ça marche) |
10. Concepts du cours appliqués
| Concept | Application |
|---|---|
| Timer CTC | Timer2 avec OCR2=124, tick 1 ms pour les overlays |
| Timer Fast PWM | Timer1 mode 14, PWM 50 Hz pour le servo |
| Prescaler | Timer1 /8, Timer2 /32 |
| Double buffering OCR | OCR1A bufferisé pour éviter les glitchs servo |
| Interruption externe | INT7 sur front descendant pour RC5 |
| ISR | .org INT7addr et .org OC2addr dans main.asm |
| Sauvegarde contexte | Push/pop de SREG, r16, r17 et registres touchés |
| Section critique | EEPROM et accès 16 bits à overlay_ms_left |
| Architecture Harvard | Flash, SRAM et EEPROM séparées |
| LPM | Lecture tables stepper, chaînes LCD, LUT bitmask |
| XMEM | LCD HD44780 à 0x8000 / 0xC000 |
| UART asynchrone | 19 200 bauds, polling RXC0 |
| Manchester | Décodage RC5 par échantillonnage bit-bang |
| Adressage indirect | X/Y/Z pour buffers SRAM, EEPROM, Flash |
| Machine à états | FSM à deux couches |
| Arithmétique multi-octets | mul22, div22, comparaisons 16 bits |
11. Compilation et déploiement
Environnement :
- IDE : Atmel Studio ou Microchip Studio ;
- cible : ATmega128 ;
- configuration : Debug.
Pour recompiler :
- ouvrir
code_source/Projet_MC.asmproj; - vérifier
Project → Properties → Device = ATmega128; - lancer
Build → Build SolutionouF7.
Fichiers de sortie :
| Fichier | Description | Usage |
|---|---|---|
Debug/Projet_MC.hex | Firmware principal Intel HEX | Flash via ISP/JTAG |
Debug/Projet_MC.eep | Image EEPROM initiale | Programme les 10 satellites |
Debug/Projet_MC.lss | Listing assembleur | Debug et vérification |
Debug/Projet_MC.map | Carte mémoire | Vérifier les adresses |
Flash via avrdude :
avrdude -p m128 -c stk500 -U flash:w:Projet_MC.hex:i
avrdude -p m128 -c stk500 -U eeprom:w:Projet_MC.eep:i12. Rétrospective
12.1 Ce qui a bien fonctionné
- la séparation drivers/libs a permis de travailler en parallèle ;
- le framework de macros du cours a rendu l’assembleur soutenable ;
- le miroir UART a été indispensable pour diagnostiquer l’état interne ;
- la FSM à deux couches a bien absorbé l’ajout du mode SCAN.
12.2 Ce qu’on referait différemment
- ajouter un référencement automatique du stepper au démarrage ;
- remplacer l’ISR RC5 bloquante par un décodage non bloquant avec Timer Capture ;
- construire des tests unitaires via simulateur AVR pour les algorithmes math et la logique FSM.
12.3 Limites du système
- pas de tracking orbital en temps réel ;
- pas de communication radio avec les satellites ;
- oscillateur RC à ±3%, ce qui limite la marge de décodage RC5 ;
- pas de sauvegarde de la position azimut entre deux redémarrages.
13. Annexes techniques
13.1 Carte mémoire SRAM
| Adresse | Variable | Taille | Description |
|---|---|---|---|
0x0100 | last_addr | 1B | Adresse RC5 dernière trame |
0x0101 | last_cmd | 1B | Commande RC5 dernière trame |
0x0102 | last_tog | 1B | Toggle bit RC5 |
0x0103 | ir_event_flag | 1B | Flag ISR → main |
0x0104 | mode | 1B | 0=AUTO, 1=MANUEL, 2=SCAN |
0x0105 | sub_state | 1B | Sous-état du mode actif |
0x0106 | fsm_layer | 1B | 0=BROWSING, 1=IN_MODE |
0x0107 | flag_is_moving | 1B | Transit moteur en cours |
0x0108 | lcd_l2_buf | 16B | Buffer ligne 2 LCD |
0x0118 | current_az_steps | 2B | Position azimut 0..1079 |
0x011A | held_count | 1B | Compteur répétitions RC5 |
0x011B | target_ticks | 2B | Consigne OCR1A servo |
0x011D | auto_substate | 1B | Sous-état AUTO |
0x011E | target_sat_id | 1B | Index curseur satellite |
0x011F | target_az_auto | 2B | AZ cible |
0x0121 | target_el_auto | 1B | EL cible |
0x0122 | current_sat_name | 11B | Nom satellite |
0x012D | slot_filter_mode | 1B | 0=normal, 1=filtre SCAN |
0x012E | scan_results | 4B | Bitmap 32 bits |
0x0132 | scan_cache_az | 64B | Cache AZ |
0x0172 | scan_cache_el | 32B | Cache EL |
0x0192 | scan_cache_valid | 4B | Bitmap validité cache |
0x0196 | scan_steps_done | 2B | Progression sweep |
0x0198 | scan_el_at_start | 1B | Snapshot EL |
0x0199 | motor_step_idx | 1B | Curseur séquence stepper |
0x019A | uart_enabled | 1B | Miroir UART actif |
0x019B | overlay_ms_left | 2B | Compteur overlay |
0x019D | overlay_dirty | 1B | Flag expiration overlay |
13.2 Satellites pré-programmés
| Slot | Satellite | Azimut | Élévation | Type |
|---|---|---|---|---|
| 0 | ISS | 257° | 24° | Station spatiale |
| 1 | Hubble | 142° | 56° | Télescope spatial |
| 2 | Tiangong | 89° | 72° | Station spatiale |
| 3 | Starlink | 310° | 45° | Constellation LEO |
| 4 | Envisat | 15° | 81° | Observation Terre |
| 5 | NOAA-19 | 198° | 33° | Météorologie |
| 6 | Iridium | 275° | 65° | Communication |
| 7 | Terra | 45° | 12° | Observation Terre |
| 8 | Aqua | 120° | 88° | Observation Terre |
| 9 | Suomi NPP | 82° | 41° | Météorologie |
13.3 EEPROM initiale Intel HEX
:100000005A495353202020202020200101180000AD
:100010005A487562626C65202020208E00380000F3
:100020005A5469616E676F6E67202059004800002B
:100030005A537461726C696E6B202036012D000016
:100040005A456E766973617420202020200F005100B0
:100050005A4E4F41412D31392020C600210000D2
:100060005A49726964697570202013014100003B
:100070005A5465727261202020202D000C000055
:100080005A41717561202020202078005800002E
:100090005A53756F6D69204E505052002900002C
:00000001FF13.4 Constantes principales
T1 = 1870
TOGGLE_MASK = 0x08
MODE_AUTO = 0
MODE_MANUEL = 1
MODE_SCAN = 2
MODE_COUNT = 3
LAYER_BROWSING = 0
LAYER_IN_MODE = 1
ST_AUTO_BROWSING = 0
ST_AUTO_MOVING_AZ = 1
ST_AUTO_MOVING_EL = 2
ST_AUTO_ARRIVED = 3
ST_AUTO_CONFIRM_DEL = 4
ST_SCAN_IDLE = 0
ST_SCAN_SWEEPING = 1
ST_SCAN_NO_RESULTS = 2
ST_SCAN_RESULTS_BROWSE = 3
CMD_0 .. CMD_9 = 0x00..0x09
CMD_DEL = 0x0A
CMD_POWER = 0x0C
CMD_MUTE = 0x0D
CMD_VOL_UP = 0x10
CMD_VOL_DN = 0x11
CMD_CH_UP = 0x20
CMD_CH_DN = 0x21
CMD_GUIDE = 0x22
CMD_AV = 0x38
TIMER_TOP = 10000
TICKS_MIN = 500
TICKS_MAX = 900
TICKS_STEP = 10
AZ_MAX_STEPS = 1080
AZ_STEP_PARTIAL = 3
STEPPER_DELAY_MS = 3
HOLD_THRESHOLD_MED = 10
HOLD_THRESHOLD_FAST = 30
HOLD_STEP_SLOW = 1
HOLD_STEP_MED = 5
HOLD_STEP_FAST = 10
SAT_MAGIC = 0x5A
SAT_SLOT_SIZE = 16
SAT_MAX_SLOTS = 32
SAT_NAME_LEN = 1013.5 Références techniques
- ATmega128/128L Datasheet, Atmel/Microchip, document 2467.
- TSOP1838, Vishay, récepteur IR démodulateur 38 kHz.
- HD44780U, Hitachi, contrôleur LCD dot-matrix.
- Futaba S3003, spécification servo analogique standard.
- Switec X27.168, micro-stepper bipolaire pour instrumentation.
- Vivanco UR Z2, télécommande universelle RC5.
- RC5 Protocol, Philips, protocole infrarouge bi-phase.
14. Assets à ajouter plus tard
Oui, j’inclurais une vidéo. C’est même l’asset le plus utile pour ce projet : un système embarqué avec moteurs, LCD et télécommande se comprend beaucoup plus vite en mouvement qu’en photo. Idéalement, une vidéo courte de 20 à 40 secondes suffit.
À ajouter si possible :
- une vidéo de démonstration montrant successivement
MANUEL,AUTO, puisSCAN; - une capture du terminal UART avec le miroir VT100 actif ;
- une photo ou un schéma de câblage annoté avec
PB5,PE7,PE2,PD0:3,PE0/1et les modules M1/M2/M4 ; - une photo rapprochée du servo et de la tête d’antenne pour visualiser l’axe d’élévation ;
- une capture nette du LCD au démarrage, en
MODE: AUTO; - une capture pendant
MANUEL MOVING; - une capture pendant
SCANNING AZ:xxxouN SATS DETECTED; - un chronogramme RC5 propre, exporté depuis une simulation ou redessiné ;
- un schéma plus propre de l’organigramme de la boucle principale ;
- éventuellement un court GIF du mini-balai SCAN si la vidéo complète est trop lourde pour la page.
Rapport original
Le PDF ci-dessous conserve la version académique complète du projet, avec les annexes et le code source remis.
Embedded PDF
Station de pointage d'antenne satellitaire — rapport original
Rapport complet du projet MICRO-210 EPFL, incluant la documentation technique, les annexes, les tableaux périphériques et le code assembleur.