Linked-Crossing
Projet de semestre EPFL en C++ et GTKmm : simulation d’une arène circulaire, chaîne articulée guidée par FABRIK, parseur de scénarios. Webplayer ajouté a posteriori pour le site.
Version jouable
Start lance la partie, Space met en pause, clic gauche
capture, clic droit guide.
Résumé
Linked-Crossing est un projet de semestre réalisé à l’EPFL en C++ avec une interface GTKmm, auquel j’ai ajouté ensuite un webplayer pour le site.
Le jeu se déroule dans une arène circulaire peuplée de particules et de faiseurs. Le joueur construit une chaîne articulée en capturant des particules, puis la guide vers un but opposé dans l’arène sans casser les contraintes géométriques ni heurter les obstacles mobiles.
Ce qui rend le projet intéressant n’est pas seulement son aspect visuel, mais surtout son architecture logicielle :
- un moteur de simulation discret ;
- une hiérarchie d’entités mobiles en C++ orienté objet ;
- un socle géométrique réutilisable ;
- un parseur robuste de scénarios textuels ;
- une étape de guidage inspirée de FABRIK ;
- une séparation nette entre modèle, logique d’interface et rendu.
Projet réalisé en collaboration avec Perla Brodowicz.
Contexte et objectif
Le cahier des charges imposait une arène circulaire de rayon fixe dans laquelle coexistent trois familles d’objets :
- des particules mobiles qui se dupliquent au fil du temps ;
- des faiseurs, obstacles dynamiques composés de plusieurs éléments ;
- une chaîne articulée construite progressivement par capture.
Le cœur du problème n’est donc pas “faire un mini-jeu”, mais maintenir plusieurs invariants simultanément :
- garder une géométrie valide à chaque étape ;
- refléter correctement les mobiles sur le bord de l’arène ;
- empêcher les captures illégales ;
- préserver la longueur des segments pendant le guidage ;
- piloter le tout via une API assez propre pour l’interface graphique.
Architecture du dépôt
Le dépôt est bien découpé et reflète directement l’architecture du code :
src/projet.cc: point d’entrée ;src/gui.ccetinclude/gui.h: interface GTKmm, événements et timer ;src/graphic.ccetinclude/graphic.h: primitives de rendu ;src/jeu.ccetinclude/jeu.h: façade principale du moteur ;src/mobile.ccetinclude/mobile.h: entités mobilesParticuleetFaiseur;src/chaine.ccetinclude/chaine.h: chaîne articulée et collisions ;src/tools.ccetinclude/tools.h: géométrie 2D, vecteurs, tests et wrappers de dessin ;src/message.cc: messages de validation et d’erreur imposés par le cours.
Le bon choix de conception ici est que Jeu sert de façade : l’interface ne
manipule pas directement les structures internes, elle demande au moteur de
lire un fichier, de mettre à jour la simulation, de construire la chaîne, ou de
faire un pas de guidage.
Explication du code
1. Jeu comme façade du moteur
La classe Jeu concentre l’état global : score, particules, faiseurs, chaîne,
mode courant et statut de la partie.
Elle expose aussi les opérations de plus haut niveau :
lireFichieretsauvegarderFichierpour la sérialisation ;updateJeupour avancer d’un tick ;tryConstructChainpour capturer une particule ;guidanceSteppour déplacer la chaîne vers un but intermédiaire ;checkGameStatuspour déterminer victoire ou défaite.
Le guidage est particulièrement élégant parce qu’il ne déforme jamais aveuglément la chaîne : il calcule un but atteignable, exécute deux passes FABRIK, valide la configuration, puis seulement après applique le résultat.
bool Jeu::guidanceStep(const S2d& target_point) {
const auto& articulations = chaine.getArticulations();
if (!canGuide(articulations))
return false;
S2d intermediate = computeIntermediateGoal(articulations.back(), target_point);
auto p_prime = fabrikPhase1(articulations, intermediate);
auto p_pp = fabrikPhase2(articulations, p_prime);
if (!isValidConfiguration(p_pp))
return false;
applyConfiguration(p_pp);
checkGameStatus();
return true;
}Cette étape résume bien la philosophie générale du projet : tenter une transformation, mais ne jamais compromettre les invariants du modèle.
2. Le socle géométrique dans tools
Le module tools fournit les briques géométriques de base :
S2dpour les points ;Circlepour les cercles ;Vectorpour les opérations directionnelles ;distance,normalizeAngle, les tests d’inclusion et d’intersection ;- des wrappers de dessin qui isolent la dépendance graphique.
Un détail important est l’usage explicite d’une tolérance numérique
epsil_zero. Le code ne traite pas seulement des figures idéales, mais des
comparaisons flottantes réellement utilisées lors de la lecture des scénarios et
pendant l’exécution. C’est ce qui permet d’éviter des faux positifs ou des cas
géométriques instables.
3. Hiérarchie objet : Mobile, Particule, Faiseur
La structure orientée objet du projet repose sur une base abstraite Mobile
spécialisée en Particule et Faiseur.
Cette hiérarchie factorise ce qui est commun :
- position ;
- angle ;
- déplacement ;
- mise à jour ;
- dessin ;
- sérialisation.
Les particules possèdent en plus une logique de duplication temporelle. À intervalle régulier, elles se scindent en deux particules filles avec des angles décalés et une vitesse réduite.
Les faiseurs, eux, jouent le rôle d’obstacles segmentés. Leur tête est stockée explicitement, puis le reste de la structure est reconstruit à la demande, ce qui garde l’état compact tout en simplifiant collisions et rendu.
4. La chaîne articulée et FABRIK
La chaîne est une suite ordonnée d’articulations soumise à deux règles simples mais fortes :
- la racine doit rester cohérente avec la frontière de l’arène ;
- la distance entre deux articulations successives ne peut pas dépasser
r_capture.
L’ajout d’une articulation reste volontairement local :
- si la chaîne est vide, la particule capturée devient la racine ;
- sinon, seule une particule dans la région de capture de l’effecteur peut être ajoutée ;
- si plusieurs particules sont candidates, l’opération est refusée.
Le guidage repose ensuite sur une intégration discrète de FABRIK :
- une passe de l’effecteur vers la racine ;
- une passe de la racine vers l’effecteur ;
- une validation géométrique complète avant commit.
Le résultat est un système de guidage convaincant sans tomber dans une cinématique inverse trop lourde pour un projet de cette taille.
5. Le parseur de scénarios
Le projet s’appuie sur des fichiers texte fournis dans le cadre du cours. Le parseur est donc un morceau essentiel du code, et non un simple détail utilitaire.
Son fonctionnement peut se résumer comme une machine à états :
SCORE -> NB_PARTICULES -> PARTICULES -> NB_FAISEURS -> FAISEURS
-> NB_ARTICULATIONS -> ARTICULATIONS -> MODE -> DONEChaque étape valide à la fois :
- la syntaxe de la ligne ;
- la validité locale de l’objet lu ;
- la cohérence avec l’état déjà construit.
Cette stratégie “validate before commit” évite de fabriquer des demi-états invalides, ce qui est exactement ce qu’on veut dans un projet de simulation.
6. Interface GTKmm et rendu
Le couple gui / graphic traduit le moteur en expérience interactive :
- boutons de contrôle (
Open,Save,Start,Stop,Step,Restart) ; - timer périodique ;
- gestion des clics pour construction et guidage ;
- projection du monde vers le canvas de rendu.
L’un des détails les plus propres est la transformation du repère :
- centrage au milieu de la zone de dessin ;
- mise à l’échelle isotrope ;
- inversion de l’axe
Ypour conserver un repère “mathématique”.
Autrement dit, le moteur raisonne dans son propre espace, et la vue se charge seule de la conversion graphique.
Pipeline d’une mise à jour
updateJeu agit comme le contrat temporel du système. L’ordre des opérations
compte autant que les opérations elles-mêmes :
void Jeu::updateJeu() {
if (status != ONGOING) return;
if (score > 0) score--;
else {
status = LOST;
return;
}
updateParticules();
updateFaiseurs();
bool chain_moved_by_guidance = false;
if (mode == GUIDAGE && !chaine.isEmpty() && chaine.getNbArticulations() > 1) {
if (guidanceStep(intermediate_guidance_goal)) {
chain_moved_by_guidance = true;
}
}
if (chain_moved_by_guidance) {
handleChainCollision();
}
checkGameStatus();
}Cette séquence impose une causalité claire :
- le score baisse d’abord ;
- les particules et les faiseurs avancent ensuite ;
- le guidage agit sur une simulation déjà mise à jour ;
- les collisions sont recontrôlées si la chaîne a réellement bougé ;
- l’état final n’est évalué qu’une fois le tick stabilisé.
C’est une très bonne illustration d’un point souvent sous-estimé en première année : dans un moteur de jeu simple, la robustesse dépend beaucoup de l’ordonnancement.
Validation par scénarios
Le rapport final conserve plusieurs campagnes de test intéressantes. Deux séries ressortent particulièrement :
t22.txtpour la construction progressive de la chaîne et le guidage ;t35.txtpour la destruction de chaîne lors d’une collision avec un faiseur.
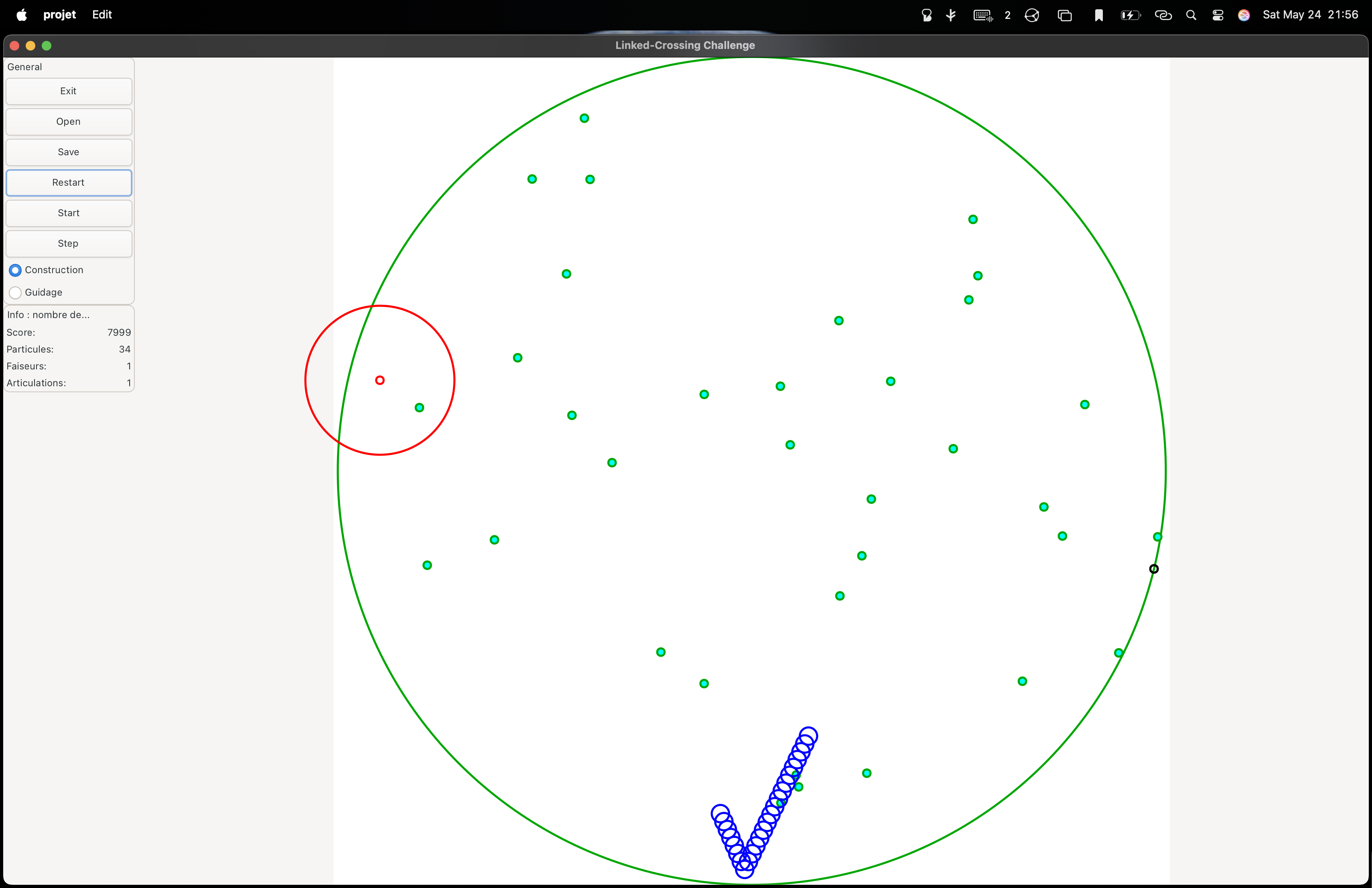
Début du scénario t22
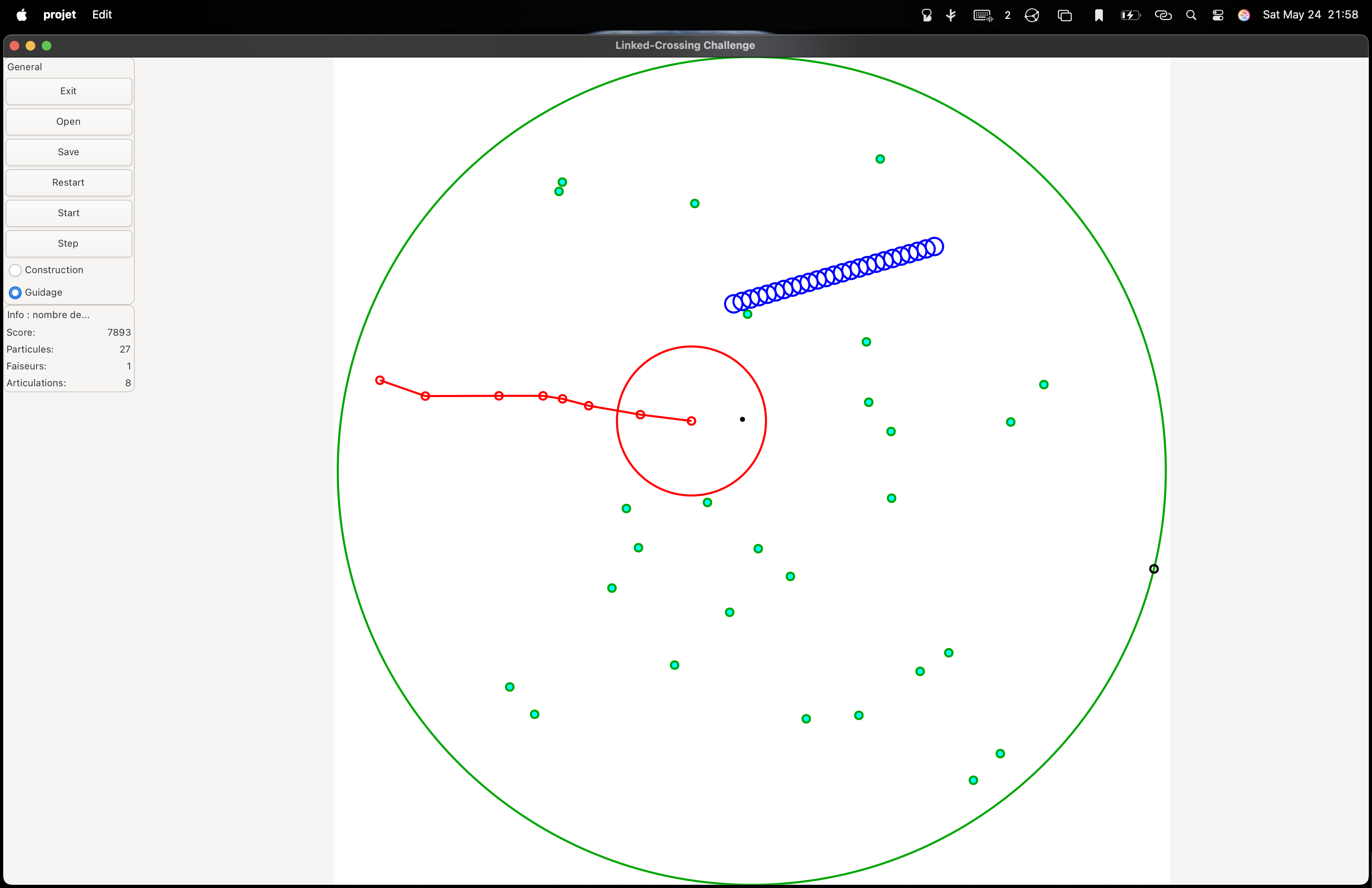
Guidage intermédiaire avec FABRIK
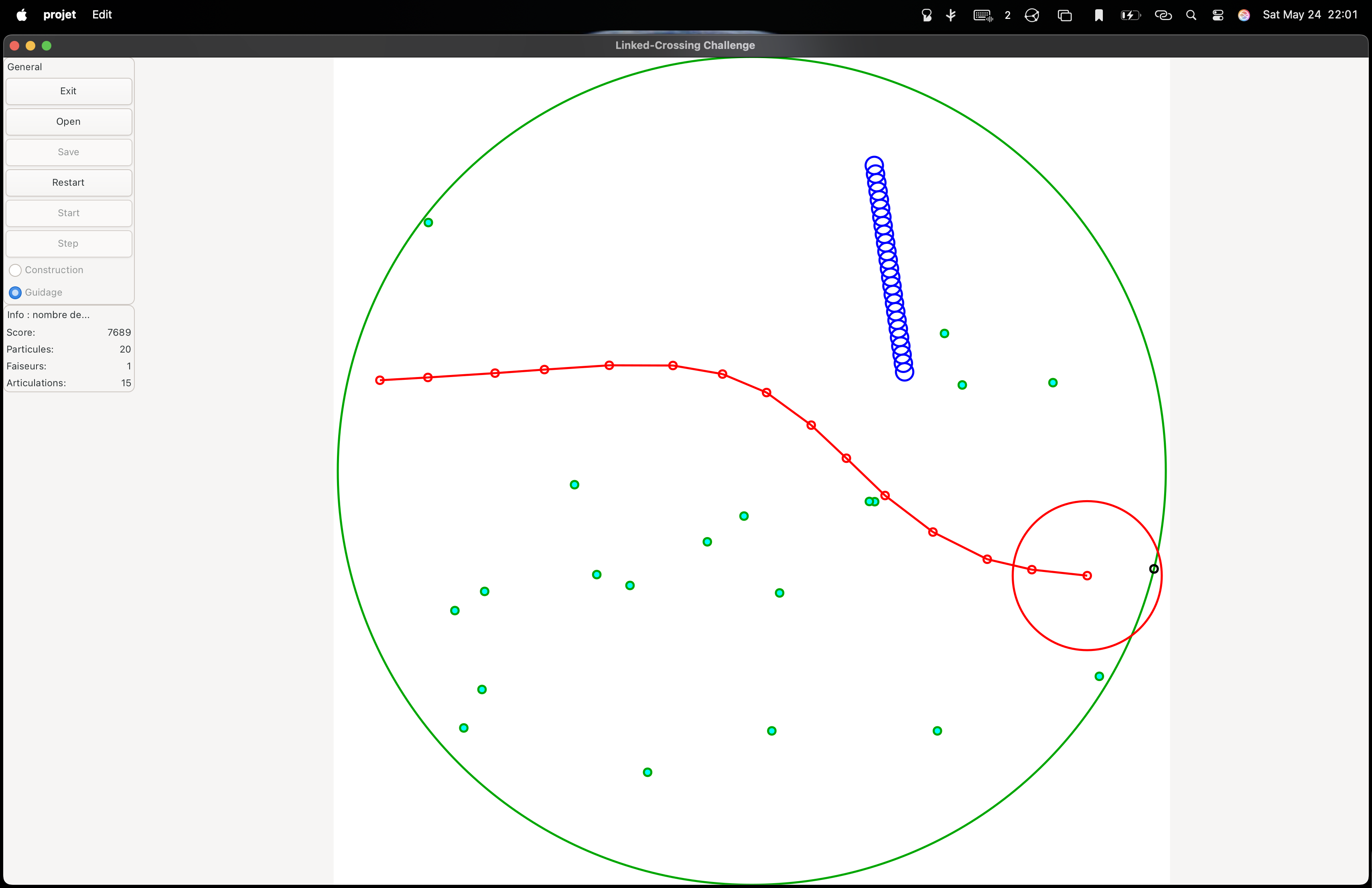
Croissance de la chaîne et navigation
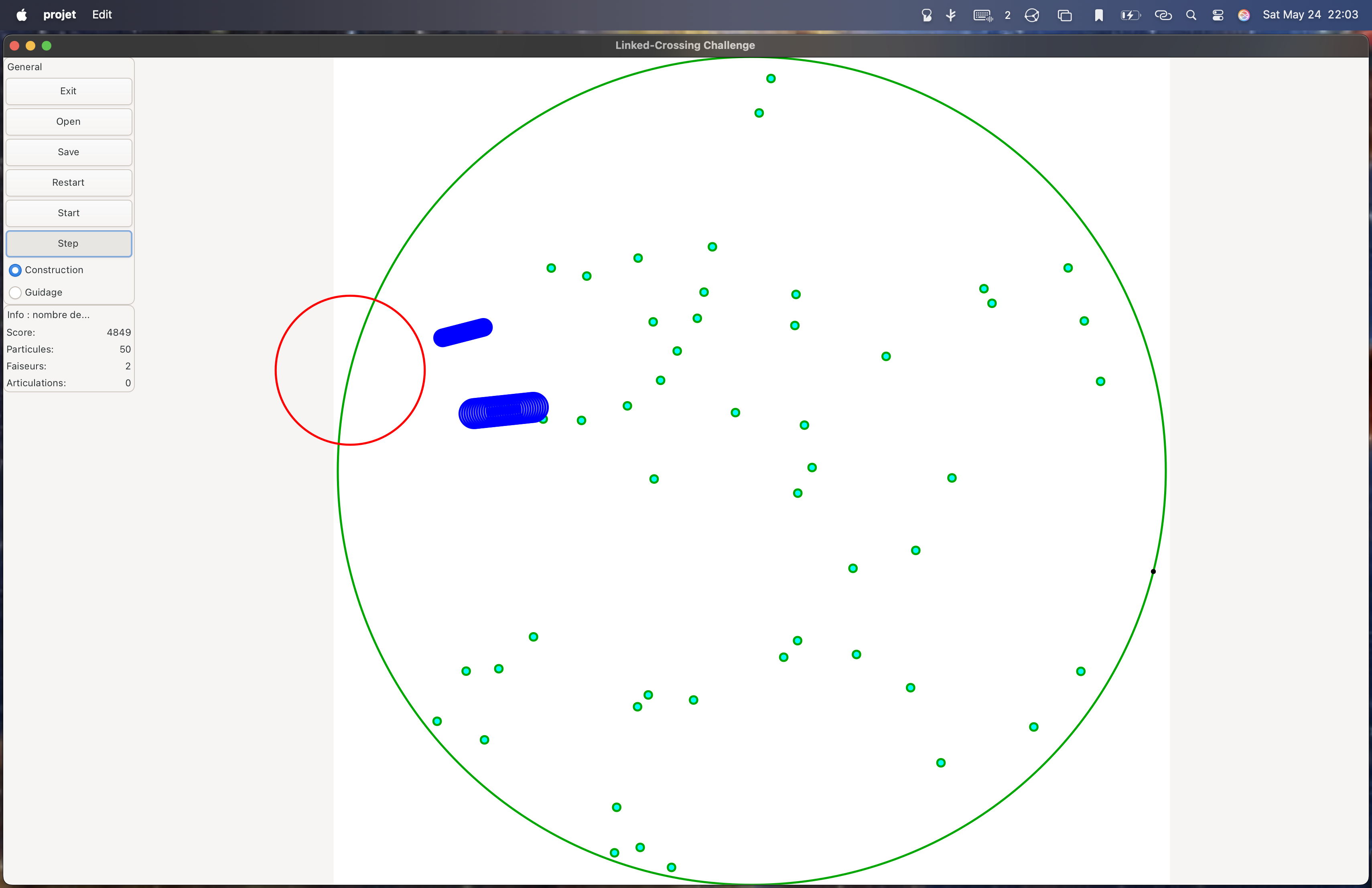
Collision et destruction de la chaîne
Ces scénarios sont utiles parce qu’ils testent des interactions transversales :
- rendu graphique ;
- géométrie ;
- règles métier ;
- mise à jour temporelle ;
- cohérence globale du guidage.
Crédits
Projet réalisé avec Perla Brodowicz. J’ai principalement travaillé sur le moteur, la simulation et la lecture/écriture des scénarios, ainsi que sur l’interface le rendu graphique et l’intégration côté interaction tandis que Perla a principalement passé son temps à jouer au jeu. Mais shout out pour la bonne humeur. Bravo.
Rapport original
Le rapport académique d’origine est conservé ci-dessous comme archive technique. Il complète la synthèse de cette page avec le contexte du cours, les captures de test et la répartition détaillée du travail.
Embedded PDF
Linked-Crossing — rapport de rendu original
Archive du rapport académique conservée avec le projet. Le document détaille les scénarios de validation, la progression par rendus et la répartition du travail avec Perla Brodowicz.